Introduction to Process Synchronization
Process synchronization is a fundamental concept in operating systems that ensures multiple processes can safely access shared resources without causing data corruption or inconsistent states. When processes run concurrently and share memory, files, or other resources, proper synchronization mechanisms become crucial to maintain system integrity and prevent unpredictable behavior.
In modern computing environments, where multi-core processors and parallel processing are the norm, understanding process synchronization is essential for developers and system administrators alike. This article explores the core concepts of critical sections and race conditions, providing practical examples and interactive demonstrations to solidify your understanding.
Understanding Race Conditions
A race condition occurs when the outcome of a program depends on the timing or order of execution of multiple processes or threads. The term “race” refers to the fact that processes are essentially racing to access shared resources, and the final result depends on which process “wins” the race.
Characteristics of Race Conditions
- Non-deterministic behavior: The same program may produce different results on different runs
- Timing dependency: The outcome depends on the relative timing of process execution
- Shared resource access: Multiple processes attempt to access the same resource simultaneously
- Lack of coordination: Processes don’t coordinate their access to shared resources
Simple Race Condition Example
Consider a simple banking system where two processes are trying to update the same account balance:
// Shared variable
int account_balance = 1000;
// Process A: Deposit $100
void deposit() {
int temp = account_balance; // Read: temp = 1000
temp = temp + 100; // Calculate: temp = 1100
account_balance = temp; // Write: account_balance = 1100
}
// Process B: Withdraw $50
void withdraw() {
int temp = account_balance; // Read: temp = 1000
temp = temp - 50; // Calculate: temp = 950
account_balance = temp; // Write: account_balance = 950
}
If both processes execute simultaneously, the final balance might be incorrect depending on the order of operations. Instead of the expected $1050, the balance might be $1100 or $950, depending on which operation completes last.

Critical Sections Explained
A critical section is a segment of code that accesses shared resources and must not be executed by more than one process at a time. The critical section is the root cause of race conditions, as it’s where processes compete for shared resources.
Properties of Critical Sections
An effective critical section implementation must satisfy three essential properties:
- Mutual Exclusion: Only one process can execute in its critical section at any given time
- Progress: If no process is executing in its critical section, and some processes wish to enter, only those processes not executing in their remainder section can participate in deciding which will enter next
- Bounded Waiting: There must be a bound on the number of times other processes can enter their critical sections after a process has made a request
Critical Section Structure
A typical process structure with critical section looks like this:
do {
// Entry Section
request_entry();
// Critical Section
access_shared_resource();
// Exit Section
release_entry();
// Remainder Section
other_operations();
} while (true);

Synchronization Mechanisms
Software Solutions
Peterson’s Algorithm
Peterson’s algorithm is a classic software solution for two-process synchronization:
// Shared variables
bool flag[2] = {false, false};
int turn = 0;
// Process Pi (i = 0 or 1)
void process_i(int i) {
int j = 1 - i; // Other process index
do {
// Entry section
flag[i] = true;
turn = j;
while (flag[j] && turn == j) {
// Busy wait
}
// Critical section
printf("Process %d in critical section\n", i);
// Exit section
flag[i] = false;
// Remainder section
// Other work...
} while (true);
}
Hardware Solutions
Test-and-Set Lock
Hardware-based solutions use atomic operations that cannot be interrupted:
// Atomic test-and-set operation
bool test_and_set(bool *lock) {
bool old_value = *lock;
*lock = true;
return old_value;
}
// Using test-and-set for synchronization
bool lock = false;
void critical_section_with_tas() {
// Entry section
while (test_and_set(&lock)) {
// Busy wait
}
// Critical section
printf("Executing critical section\n");
// Exit section
lock = false;
}
Synchronization Primitives
Mutex (Mutual Exclusion)
A mutex is a synchronization primitive that allows only one thread to access a shared resource at a time:
#include <pthread.h>
#include <stdio.h>
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int shared_counter = 0;
void* increment_counter(void* arg) {
for (int i = 0; i < 100000; i++) {
pthread_mutex_lock(&mutex);
// Critical section
shared_counter++;
pthread_mutex_unlock(&mutex);
}
return NULL;
}
int main() {
pthread_t t1, t2;
pthread_create(&t1, NULL, increment_counter, NULL);
pthread_create(&t2, NULL, increment_counter, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
printf("Final counter value: %d\n", shared_counter);
return 0;
}
Semaphores
Semaphores are more flexible synchronization primitives that can control access to a resource pool:
#include <semaphore.h>
#include <pthread.h>
sem_t semaphore;
int resource_pool = 3; // Allow 3 concurrent accesses
void* access_resource(void* arg) {
int id = *(int*)arg;
// Wait for resource
sem_wait(&semaphore);
printf("Process %d acquired resource\n", id);
sleep(2); // Simulate work
printf("Process %d releasing resource\n", id);
// Release resource
sem_post(&semaphore);
return NULL;
}
int main() {
sem_init(&semaphore, 0, 3); // Initialize with 3 permits
pthread_t threads[5];
int ids[5];
for (int i = 0; i < 5; i++) {
ids[i] = i;
pthread_create(&threads[i], NULL, access_resource, &ids[i]);
}
for (int i = 0; i < 5; i++) {
pthread_join(threads[i], NULL);
}
sem_destroy(&semaphore);
return 0;
}
Common Synchronization Problems
Producer-Consumer Problem
This classic problem involves processes that produce data and others that consume it from a shared buffer:

#define BUFFER_SIZE 10
int buffer[BUFFER_SIZE];
int in = 0, out = 0;
sem_t empty, full;
pthread_mutex_t mutex;
void* producer(void* arg) {
int item;
while (true) {
item = produce_item();
sem_wait(∅);
pthread_mutex_lock(&mutex);
buffer[in] = item;
in = (in + 1) % BUFFER_SIZE;
pthread_mutex_unlock(&mutex);
sem_post(&full);
}
}
void* consumer(void* arg) {
int item;
while (true) {
sem_wait(&full);
pthread_mutex_lock(&mutex);
item = buffer[out];
out = (out + 1) % BUFFER_SIZE;
pthread_mutex_unlock(&mutex);
sem_post(∅);
consume_item(item);
}
}
Dining Philosophers Problem
This problem illustrates the challenges of avoiding deadlock in resource allocation:

Advanced Synchronization Concepts
Reader-Writer Problem
In scenarios where multiple readers can access data simultaneously, but writers need exclusive access:
pthread_mutex_t rw_mutex = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t read_count_mutex = PTHREAD_MUTEX_INITIALIZER;
int read_count = 0;
void* reader(void* arg) {
int id = *(int*)arg;
pthread_mutex_lock(&read_count_mutex);
read_count++;
if (read_count == 1) {
pthread_mutex_lock(&rw_mutex); // First reader locks
}
pthread_mutex_unlock(&read_count_mutex);
// Reading
printf("Reader %d is reading\n", id);
sleep(1);
pthread_mutex_lock(&read_count_mutex);
read_count--;
if (read_count == 0) {
pthread_mutex_unlock(&rw_mutex); // Last reader unlocks
}
pthread_mutex_unlock(&read_count_mutex);
return NULL;
}
void* writer(void* arg) {
int id = *(int*)arg;
pthread_mutex_lock(&rw_mutex);
// Writing
printf("Writer %d is writing\n", id);
sleep(2);
pthread_mutex_unlock(&rw_mutex);
return NULL;
}
Deadlock Prevention and Detection
Deadlock Conditions
Deadlock occurs when four conditions are met simultaneously:
- Mutual Exclusion: Resources cannot be shared
- Hold and Wait: Processes hold resources while waiting for others
- No Preemption: Resources cannot be forcibly taken away
- Circular Wait: A circular chain of processes waiting for resources
Deadlock Prevention Strategies
// Strategy 1: Ordered resource allocation
void prevent_deadlock_ordered() {
// Always acquire locks in the same order
pthread_mutex_lock(&mutex1);
pthread_mutex_lock(&mutex2);
// Critical section
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
}
// Strategy 2: Timeout-based locking
void prevent_deadlock_timeout() {
struct timespec timeout;
clock_gettime(CLOCK_REALTIME, &timeout);
timeout.tv_sec += 1; // 1 second timeout
if (pthread_mutex_timedlock(&mutex1, &timeout) == 0) {
if (pthread_mutex_timedlock(&mutex2, &timeout) == 0) {
// Critical section
pthread_mutex_unlock(&mutex2);
}
pthread_mutex_unlock(&mutex1);
}
}
Performance Considerations
Spin Locks vs. Blocking Locks
Understanding when to use different synchronization mechanisms:
// Spin lock - good for short critical sections
void spinlock_example() {
volatile int lock = 0;
// Acquire
while (__sync_lock_test_and_set(&lock, 1)) {
// Busy wait - consumes CPU
}
// Critical section
// Release
__sync_lock_release(&lock);
}
// Mutex - better for longer critical sections
void mutex_example() {
pthread_mutex_lock(&mutex);
// Critical section - thread may be suspended
pthread_mutex_unlock(&mutex);
}
Best Practices for Process Synchronization
Design Guidelines
- Minimize critical section size: Keep critical sections as small as possible
- Avoid nested locks: Reduce the risk of deadlock
- Use timeout mechanisms: Prevent indefinite blocking
- Choose appropriate primitives: Select the right tool for the job
- Test thoroughly: Race conditions can be intermittent and hard to reproduce
Common Pitfalls
// BAD: Race condition in checking and setting
if (shared_variable == 0) {
shared_variable = 1; // Another thread might set it here
}
// GOOD: Atomic operation
if (__sync_bool_compare_and_swap(&shared_variable, 0, 1)) {
// Successfully set from 0 to 1
}
Testing and Debugging Synchronization Issues
Tools and Techniques
Several tools can help identify synchronization problems:
- Helgrind (Valgrind): Detects race conditions and deadlocks
- ThreadSanitizer: Runtime race condition detector
- Static analysis tools: Identify potential synchronization issues at compile time
- Stress testing: Run concurrent tests under high load
# Using ThreadSanitizer
gcc -fsanitize=thread -g program.c -o program
./program
# Using Helgrind
valgrind --tool=helgrind ./program
Real-World Applications
Database Systems
Database management systems use sophisticated locking mechanisms to ensure ACID properties while maximizing concurrency. Techniques include:
- Row-level locking: Lock individual database rows
- Multi-version concurrency control: Allow readers without blocking writers
- Deadlock detection: Automatically resolve circular wait situations
Web Servers
High-performance web servers handle thousands of concurrent connections using various synchronization strategies:
- Thread pools: Reuse threads to handle multiple requests
- Lock-free data structures: Minimize contention in hot paths
- Event-driven architectures: Reduce the need for explicit synchronization
Conclusion
Process synchronization is a critical aspect of operating systems that ensures correct behavior in concurrent environments. Understanding critical sections, race conditions, and various synchronization mechanisms is essential for developing robust, scalable applications.
Key takeaways include:
- Race conditions occur when multiple processes access shared resources without proper coordination
- Critical sections must be protected using appropriate synchronization primitives
- Different synchronization mechanisms serve different purposes and have varying performance characteristics
- Proper design and testing are crucial for avoiding deadlocks and ensuring system reliability
As systems become increasingly parallel and distributed, mastering these concepts becomes even more important for system developers and architects. By applying the principles and techniques discussed in this article, you can build more reliable and efficient concurrent systems.
Related Posts

Thread Synchronization: Mutexes, Semaphores and Deadlocks in Operating Systems
Introduction to Thread Synchronization Thread synchronization is a fundamental concept in operating systems that ensures multiple threads can safely access...

Multithreading in Operating Systems: Benefits, Challenges, and Implementation Guide
What is Multithreading in Operating Systems? Multithreading is a fundamental concept in modern operating systems that allows a single process...

Critical Section Problem: Complete Guide to Mutual Exclusion Solutions in Operating Systems
What is the Critical Section Problem? The critical section problem is a fundamental challenge in operating systems where multiple processes...

Peterson’s Algorithm: Complete Guide to Two-Process Mutual Exclusion in Operating Systems
What is Peterson's Algorithm? Peterson's Algorithm is a classic solution for achieving mutual exclusion between two processes or threads in...
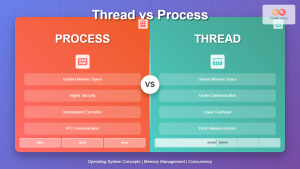
Thread vs Process: Complete Guide to Differences and When to Use Each
Understanding the fundamental differences between threads and processes is crucial for system programming, application design, and performance optimization. While both...

Monitor in Operating System: High-level Synchronization for Process Coordination
What is a Monitor in Operating System? A monitor is a high-level synchronization construct in operating systems that provides a...
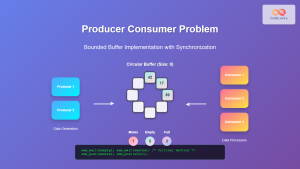
Producer Consumer Problem: Complete Guide to Bounded Buffer Implementation with Code Examples
The Producer Consumer Problem, also known as the bounded buffer problem, is one of the most fundamental synchronization problems in...
Thread in Operating System: Lightweight Processes and Multithreading Explained
What are Threads in Operating Systems? A thread is the smallest unit of execution within a process that can be...

Mutex vs Semaphore: Complete Guide to Synchronization Primitives in Operating Systems
In the world of concurrent programming and operating systems, synchronization primitives are essential tools that prevent race conditions and ensure...

File Locking Mechanisms: Complete Guide to Advisory and Mandatory Locking in Operating Systems
File locking mechanisms are essential components of modern operating systems that prevent data corruption and ensure data integrity when multiple...

C++ Thread Synchronization: Mutexes and Locks
In the world of modern C++ programming, multithreading has become an essential technique for improving application performance and responsiveness. However,...

Java Thread Synchronization: Managing Shared Resources
In the world of multi-threaded Java applications, synchronization is a crucial concept that every developer must master. It's the key...