In the world of modern computing, efficiency is key. As processors become more powerful and capable of handling multiple tasks simultaneously, it's crucial for programmers to harness this potential. Enter multithreading – a programming concept that allows a single program to perform multiple tasks concurrently. In this comprehensive guide, we'll dive deep into C thread programming, exploring the fundamentals of multithreading and how to implement it effectively in C.
Understanding Threads
Before we delve into the intricacies of C thread programming, let's establish a solid foundation by understanding what threads are and why they're important.
🧵 A thread is the smallest unit of execution within a process. It's a lightweight, independent sequence of programmed instructions that can be scheduled and executed by the operating system.
In a traditional single-threaded program, tasks are executed sequentially. However, in a multithreaded program, multiple threads can run concurrently, potentially utilizing multiple CPU cores and significantly improving performance.
Key Benefits of Multithreading:
- Improved Performance: By utilizing multiple CPU cores, multithreaded programs can execute tasks faster.
- Enhanced Responsiveness: In applications with a user interface, multithreading can keep the UI responsive while performing background tasks.
- Resource Sharing: Threads within the same process can easily share resources, making communication between different parts of a program more efficient.
- Simplified Program Structure: Complex operations can be broken down into simpler, more manageable threads.
Getting Started with C Thread Programming
To work with threads in C, we'll be using the POSIX threads (pthreads) library. This library provides a standardized interface for creating and managing threads across various Unix-like operating systems.
Including the Pthread Library
To use pthreads in your C program, you need to include the pthread header file and link against the pthread library. Here's how you can do it:
#include <pthread.h>
When compiling your program, you'll need to link against the pthread library using the -pthread flag:
gcc -pthread your_program.c -o your_program
Creating a Simple Thread
Let's start with a basic example of creating and running a thread in C. We'll create a program that spawns a new thread to print a message.
#include <stdio.h>
#include <pthread.h>
void* print_message(void* arg) {
char* message = (char*) arg;
printf("Thread says: %s\n", message);
return NULL;
}
int main() {
pthread_t thread;
char* message = "Hello from the new thread!";
if (pthread_create(&thread, NULL, print_message, (void*) message) != 0) {
fprintf(stderr, "Error creating thread\n");
return 1;
}
printf("Main thread waiting...\n");
if (pthread_join(thread, NULL) != 0) {
fprintf(stderr, "Error joining thread\n");
return 1;
}
printf("Thread finished. Main thread exiting.\n");
return 0;
}
Let's break down this example:
-
We define a function
print_messagethat will be executed by our new thread. This function takes a void pointer as an argument and returns a void pointer. -
In the
mainfunction, we declare apthread_tvariable to hold our thread identifier. -
We use
pthread_createto spawn a new thread. This function takes four arguments:- A pointer to the thread identifier
- Thread attributes (NULL for default)
- The function to be executed by the thread
- Arguments to be passed to the thread function
-
We use
pthread_jointo wait for the thread to finish execution before the main thread continues.
When you run this program, you should see output similar to this:
Main thread waiting...
Thread says: Hello from the new thread!
Thread finished. Main thread exiting.
Thread Synchronization: Mutex Locks
When working with multiple threads, it's crucial to manage shared resources properly to avoid race conditions and ensure data integrity. One common synchronization mechanism is the mutex (mutual exclusion) lock.
Let's modify our previous example to demonstrate the use of a mutex:
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
#define NUM_THREADS 5
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int shared_variable = 0;
void* increment_shared(void* arg) {
int thread_id = *(int*)arg;
for (int i = 0; i < 5; i++) {
pthread_mutex_lock(&mutex);
shared_variable++;
printf("Thread %d incremented shared_variable to %d\n", thread_id, shared_variable);
pthread_mutex_unlock(&mutex);
sleep(1); // Simulate some work
}
return NULL;
}
int main() {
pthread_t threads[NUM_THREADS];
int thread_ids[NUM_THREADS];
for (int i = 0; i < NUM_THREADS; i++) {
thread_ids[i] = i;
if (pthread_create(&threads[i], NULL, increment_shared, &thread_ids[i]) != 0) {
fprintf(stderr, "Error creating thread %d\n", i);
return 1;
}
}
for (int i = 0; i < NUM_THREADS; i++) {
if (pthread_join(threads[i], NULL) != 0) {
fprintf(stderr, "Error joining thread %d\n", i);
return 1;
}
}
printf("Final value of shared_variable: %d\n", shared_variable);
return 0;
}
In this example:
-
We define a global mutex and a shared variable.
-
The
increment_sharedfunction usespthread_mutex_lockandpthread_mutex_unlockto protect access to the shared variable. -
We create multiple threads, each of which increments the shared variable multiple times.
The output will show that the shared variable is incremented in a controlled manner, without race conditions:
Thread 0 incremented shared_variable to 1
Thread 1 incremented shared_variable to 2
Thread 2 incremented shared_variable to 3
Thread 3 incremented shared_variable to 4
Thread 4 incremented shared_variable to 5
Thread 0 incremented shared_variable to 6
...
Final value of shared_variable: 25
Condition Variables
Condition variables provide a way for threads to synchronize based on the value of data. They are often used in producer-consumer scenarios. Let's implement a simple producer-consumer problem using condition variables:
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
#define BUFFER_SIZE 5
int buffer[BUFFER_SIZE];
int count = 0;
int in = 0;
int out = 0;
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t full = PTHREAD_COND_INITIALIZER;
pthread_cond_t empty = PTHREAD_COND_INITIALIZER;
void* producer(void* arg) {
int item;
for (int i = 0; i < 10; i++) {
item = rand() % 100; // Produce a random item
pthread_mutex_lock(&mutex);
while (count == BUFFER_SIZE) {
pthread_cond_wait(&empty, &mutex);
}
buffer[in] = item;
in = (in + 1) % BUFFER_SIZE;
count++;
printf("Produced: %d\n", item);
pthread_cond_signal(&full);
pthread_mutex_unlock(&mutex);
sleep(1); // Simulate some work
}
return NULL;
}
void* consumer(void* arg) {
int item;
for (int i = 0; i < 10; i++) {
pthread_mutex_lock(&mutex);
while (count == 0) {
pthread_cond_wait(&full, &mutex);
}
item = buffer[out];
out = (out + 1) % BUFFER_SIZE;
count--;
printf("Consumed: %d\n", item);
pthread_cond_signal(&empty);
pthread_mutex_unlock(&mutex);
sleep(2); // Simulate some work
}
return NULL;
}
int main() {
pthread_t prod_thread, cons_thread;
pthread_create(&prod_thread, NULL, producer, NULL);
pthread_create(&cons_thread, NULL, consumer, NULL);
pthread_join(prod_thread, NULL);
pthread_join(cons_thread, NULL);
return 0;
}
This example demonstrates:
- Use of a circular buffer to store produced items.
- Mutex locks to protect shared data (buffer, count, in, out).
- Condition variables to signal when the buffer is full or empty.
- Producer waiting when the buffer is full, and consumer waiting when the buffer is empty.
The output will show items being produced and consumed:
Produced: 41
Produced: 67
Consumed: 41
Produced: 34
Consumed: 67
Produced: 0
Consumed: 34
...
Thread Detachment
By default, threads are created in a joinable state, meaning the parent thread can wait for them to finish using pthread_join. However, sometimes you might want to create a thread that runs independently and cleans up its own resources when it finishes. This is where thread detachment comes in.
Here's an example demonstrating thread detachment:
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
void* detached_thread_func(void* arg) {
printf("Detached thread starting...\n");
sleep(2);
printf("Detached thread finishing...\n");
return NULL;
}
int main() {
pthread_t thread;
pthread_attr_t attr;
pthread_attr_init(&attr);
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
if (pthread_create(&thread, &attr, detached_thread_func, NULL) != 0) {
fprintf(stderr, "Error creating detached thread\n");
return 1;
}
pthread_attr_destroy(&attr);
printf("Main thread continuing...\n");
sleep(3); // Give detached thread time to finish
printf("Main thread exiting.\n");
return 0;
}
In this example:
- We use
pthread_attr_tto set thread attributes. - We set the detach state to
PTHREAD_CREATE_DETACHEDbefore creating the thread. - The main thread doesn't wait for the detached thread using
pthread_join.
The output will be:
Detached thread starting...
Main thread continuing...
Detached thread finishing...
Main thread exiting.
Thread-Local Storage
Thread-local storage (TLS) allows each thread to have its own copy of a variable. This is useful when you want thread-specific data without the overhead of passing it as a parameter or using locks.
Here's an example demonstrating TLS:
#include <stdio.h>
#include <pthread.h>
__thread int tls_var = 0; // Thread-local variable
void* thread_func(void* arg) {
int thread_num = *(int*)arg;
tls_var = thread_num * 100;
printf("Thread %d: tls_var = %d\n", thread_num, tls_var);
return NULL;
}
int main() {
pthread_t threads[3];
int thread_nums[3] = {1, 2, 3};
for (int i = 0; i < 3; i++) {
if (pthread_create(&threads[i], NULL, thread_func, &thread_nums[i]) != 0) {
fprintf(stderr, "Error creating thread %d\n", i);
return 1;
}
}
for (int i = 0; i < 3; i++) {
pthread_join(threads[i], NULL);
}
printf("Main thread: tls_var = %d\n", tls_var);
return 0;
}
In this example:
- We declare
tls_varas a thread-local variable using the__threadkeyword. - Each thread sets its own copy of
tls_varto a different value. - The main thread's
tls_varremains unchanged.
The output will be something like:
Thread 1: tls_var = 100
Thread 2: tls_var = 200
Thread 3: tls_var = 300
Main thread: tls_var = 0
Best Practices and Considerations
As we conclude our introduction to C thread programming, let's review some best practices and important considerations:
-
Minimize Shared Data: The less data shared between threads, the easier it is to avoid race conditions and ensure thread safety.
-
Use Appropriate Synchronization: Choose the right synchronization mechanism (mutexes, condition variables, etc.) based on your specific needs.
-
Avoid Deadlocks: Be careful when using multiple locks to prevent deadlock situations where threads are waiting for each other indefinitely.
-
Thread Safety: Ensure that functions called by multiple threads are thread-safe or properly synchronized.
-
Error Handling: Always check the return values of pthread functions and handle errors appropriately.
-
Resource Management: Properly clean up resources (e.g., destroy mutexes, free memory) before thread termination.
-
Scalability: Consider the number of threads created and their impact on system resources. Creating too many threads can lead to decreased performance.
-
Debugging: Debugging multithreaded programs can be challenging. Use tools like Valgrind or thread sanitizers to help identify issues.
Conclusion
C thread programming opens up a world of possibilities for creating efficient, concurrent programs. We've covered the basics of creating and managing threads, synchronization mechanisms like mutexes and condition variables, thread detachment, and thread-local storage. These concepts form the foundation for building robust multithreaded applications in C.
As you continue your journey into the world of multithreading, remember that practice is key. Experiment with different scenarios, challenge yourself to solve complex synchronization problems, and always strive to write clean, efficient, and thread-safe code.
Happy coding, and may your threads always run smoothly! 🚀🧵
Related Posts

C++ Threads: Basics of Multithreading
In today's world of multi-core processors, understanding and implementing multithreading is crucial for developing efficient C++ applications. This article delves...

Multithreading in Operating Systems: Benefits, Challenges, and Implementation Guide
What is Multithreading in Operating Systems? Multithreading is a fundamental concept in modern operating systems that allows a single process...
Thread in Operating System: Lightweight Processes and Multithreading Explained
What are Threads in Operating Systems? A thread is the smallest unit of execution within a process that can be...
Java Threads: Basics of Multithreading
In the world of modern computing, multithreading has become an essential concept for developers to grasp. Java, being one of...

C Environment Setup: Installation and Configuration
Welcome to the world of C programming! 🖥️ Whether you're a beginner taking your first steps into coding or an...
C++ Atomic Operations: Lock-Free Programming
In the world of modern C++ programming, concurrency and parallelism have become increasingly important. As developers, we often need to...

Python Multithreading: Concurrent Execution in Python
Python multithreading is a powerful technique that allows developers to execute multiple threads concurrently within a single program. This approach...

Thread Synchronization: Mutexes, Semaphores and Deadlocks in Operating Systems
Introduction to Thread Synchronization Thread synchronization is a fundamental concept in operating systems that ensures multiple threads can safely access...

C While Loop: Condition-Based Iteration
In the world of programming, loops are essential constructs that allow us to execute a block of code repeatedly. The...
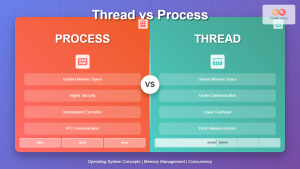
Thread vs Process: Complete Guide to Differences and When to Use Each
Understanding the fundamental differences between threads and processes is crucial for system programming, application design, and performance optimization. While both...

C Functions: Defining and Calling Functions
Functions are the building blocks of C programming, allowing you to organize your code into reusable, manageable pieces. In this...
Java Thread Lifecycle: States and Transitions
Java's multithreading capabilities are a cornerstone of its power and flexibility. At the heart of this system lies the Java...