What is Peterson’s Algorithm?
Peterson’s Algorithm is a classic solution for achieving mutual exclusion between two processes or threads in concurrent programming. Developed by Gary Peterson in 1981, this algorithm ensures that only one process can access a critical section at a time, preventing race conditions and data inconsistency.
Unlike hardware-based solutions, Peterson’s Algorithm relies purely on software mechanisms using shared variables and careful coordination between processes. It’s particularly valuable for understanding the fundamental principles of process synchronization in operating systems.
The Mutual Exclusion Problem
Before diving into Peterson’s Algorithm, let’s understand the core problem it solves:
- Critical Section: A code segment where shared resources are accessed
- Race Condition: When multiple processes access shared data simultaneously, leading to unpredictable results
- Mutual Exclusion: Ensuring only one process executes in the critical section at any given time

How Peterson’s Algorithm Works
Peterson’s Algorithm uses two shared variables to coordinate between processes:
- flag[2]: Boolean array indicating each process’s intention to enter the critical section
- turn: Integer variable indicating whose turn it is to enter the critical section
Algorithm Structure
Each process follows this pattern:
// Shared variables
boolean flag[2] = {false, false};
int turn = 0;
// Process i (where i = 0 or 1)
void process_i() {
while (true) {
// Entry section
flag[i] = true; // Show intention to enter
turn = 1 - i; // Give turn to other process
while (flag[1-i] && turn == 1-i) {
// Busy wait
}
// Critical section
// ... critical code here ...
// Exit section
flag[i] = false; // No longer interested
// Remainder section
// ... non-critical code ...
}
}
Detailed Step-by-Step Execution
Let’s trace through the algorithm execution with two processes P0 and P1:

Case Analysis
Case 1: Both processes want to enter simultaneously
// Initial state: flag[0] = false, flag[1] = false, turn = 0
// Process 0 executes:
flag[0] = true; // P0 shows intention
turn = 1; // P0 gives turn to P1
// Process 1 executes:
flag[1] = true; // P1 shows intention
turn = 0; // P1 gives turn to P0
// Now turn = 0 (last assignment wins)
// P0 checks: flag[1] && turn == 1 → true && false → false (enters CS)
// P1 checks: flag[0] && turn == 0 → true && true → true (waits)
Properties of Peterson’s Algorithm
Peterson’s Algorithm satisfies all three requirements for a correct mutual exclusion solution:
1. Mutual Exclusion
Only one process can be in the critical section at any time. This is guaranteed because:
- If both processes try to enter, the
turnvariable ensures only one succeeds - The condition
flag[1-i] && turn == 1-iprevents simultaneous entry
2. Progress
If no process is in the critical section and some processes want to enter, one of them will eventually enter. The algorithm doesn’t create deadlocks.
3. Bounded Waiting
A process waiting to enter the critical section will eventually get its chance. No process can be indefinitely postponed.

Complete Implementation Example
Here’s a complete C implementation demonstrating Peterson’s Algorithm:
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// Shared variables
volatile int flag[2] = {0, 0};
volatile int turn = 0;
volatile int shared_counter = 0;
void* process0(void* arg) {
for (int i = 0; i < 5; i++) {
// Entry section
flag[0] = 1;
turn = 1;
while (flag[1] && turn == 1) {
// Busy wait
}
// Critical section
printf("Process 0 entering critical section\n");
int temp = shared_counter;
usleep(1000); // Simulate some work
shared_counter = temp + 1;
printf("Process 0: shared_counter = %d\n", shared_counter);
// Exit section
flag[0] = 0;
// Remainder section
usleep(1000);
}
return NULL;
}
void* process1(void* arg) {
for (int i = 0; i < 5; i++) {
// Entry section
flag[1] = 1;
turn = 0;
while (flag[0] && turn == 0) {
// Busy wait
}
// Critical section
printf("Process 1 entering critical section\n");
int temp = shared_counter;
usleep(1000); // Simulate some work
shared_counter = temp + 1;
printf("Process 1: shared_counter = %d\n", shared_counter);
// Exit section
flag[1] = 0;
// Remainder section
usleep(1000);
}
return NULL;
}
int main() {
pthread_t t0, t1;
pthread_create(&t0, NULL, process0, NULL);
pthread_create(&t1, NULL, process1, NULL);
pthread_join(t0, NULL);
pthread_join(t1, NULL);
printf("Final shared_counter value: %d\n", shared_counter);
return 0;
}
Expected Output
Process 0 entering critical section
Process 0: shared_counter = 1
Process 1 entering critical section
Process 1: shared_counter = 2
Process 0 entering critical section
Process 0: shared_counter = 3
Process 1 entering critical section
Process 1: shared_counter = 4
...
Final shared_counter value: 10
Advantages and Limitations
Advantages
- Pure software solution: No special hardware instructions required
- Provably correct: Mathematically proven to satisfy all mutual exclusion requirements
- Simple implementation: Uses only basic programming constructs
- Educational value: Excellent for understanding synchronization principles
Limitations
- Busy waiting: Wastes CPU cycles while waiting
- Two processes only: Cannot be extended to more than two processes
- Memory consistency: Requires strong memory ordering guarantees
- Performance overhead: Continuous polling can be inefficient

Modern Alternatives and Applications
While Peterson’s Algorithm is primarily of historical and educational significance, modern systems typically use:
- Mutex locks: Operating system provided synchronization primitives
- Semaphores: Generalized synchronization mechanism
- Atomic operations: Hardware-supported atomic instructions
- Lock-free algorithms: Advanced techniques avoiding locks entirely
When to Use Peterson’s Algorithm
Peterson’s Algorithm is still relevant in:
- Educational contexts: Teaching mutual exclusion concepts
- Embedded systems: Resource-constrained environments
- Research: Theoretical analysis of synchronization algorithms
- Interview preparation: Common computer science interview topic
Memory Consistency Considerations
On modern processors with relaxed memory models, Peterson’s Algorithm may not work correctly without proper memory barriers. The algorithm assumes that memory operations are executed in program order, which isn’t guaranteed on all architectures.
// Modern implementation with memory barriers
void process_i() {
while (true) {
flag[i] = true;
__sync_synchronize(); // Memory barrier
turn = 1 - i;
__sync_synchronize(); // Memory barrier
while (flag[1-i] && turn == 1-i) {
// Busy wait
}
// Critical section
// ... critical code ...
__sync_synchronize(); // Memory barrier
flag[i] = false;
}
}
Conclusion
Peterson’s Algorithm represents a milestone in concurrent programming, providing an elegant software-only solution to the two-process mutual exclusion problem. While modern systems have moved beyond this approach for practical applications, understanding Peterson’s Algorithm remains crucial for:
- Grasping fundamental synchronization principles
- Appreciating the evolution of concurrent programming
- Building foundation knowledge for advanced synchronization techniques
The algorithm’s beauty lies in its simplicity and correctness, using just two shared variables to solve a complex coordination problem. For computer science students and professionals, Peterson’s Algorithm serves as an excellent introduction to the challenges and solutions in concurrent programming, paving the way for understanding more sophisticated synchronization mechanisms used in modern operating systems.
Related Posts

Critical Section Problem: Complete Guide to Mutual Exclusion Solutions in Operating Systems
What is the Critical Section Problem? The critical section problem is a fundamental challenge in operating systems where multiple processes...

Process Synchronization: Critical Sections and Race Conditions in Operating Systems
Introduction to Process Synchronization Process synchronization is a fundamental concept in operating systems that ensures multiple processes can safely access...
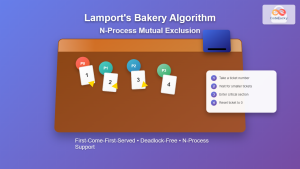
Lamport’s Bakery Algorithm: Complete Guide to N-Process Mutual Exclusion
Lamport's Bakery Algorithm stands as one of the most elegant solutions to the N-process mutual exclusion problem in concurrent programming....
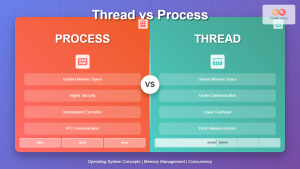
Thread vs Process: Complete Guide to Differences and When to Use Each
Understanding the fundamental differences between threads and processes is crucial for system programming, application design, and performance optimization. While both...

Thread Synchronization: Mutexes, Semaphores and Deadlocks in Operating Systems
Introduction to Thread Synchronization Thread synchronization is a fundamental concept in operating systems that ensures multiple threads can safely access...

Monitor in Operating System: High-level Synchronization for Process Coordination
What is a Monitor in Operating System? A monitor is a high-level synchronization construct in operating systems that provides a...
Binary Semaphore: Complete Guide to Mutual Exclusion Implementation in Operating Systems
What is a Binary Semaphore? A binary semaphore is a synchronization primitive in operating systems that can hold only two...
Thread in Operating System: Lightweight Processes and Multithreading Explained
What are Threads in Operating Systems? A thread is the smallest unit of execution within a process that can be...
Producer Consumer Problem: Complete Guide to Bounded Buffer Implementation with Code Examples
The Producer Consumer Problem, also known as the bounded buffer problem, is one of the most fundamental synchronization problems in...

Multithreading in Operating Systems: Benefits, Challenges, and Implementation Guide
What is Multithreading in Operating Systems? Multithreading is a fundamental concept in modern operating systems that allows a single process...
C++ Atomic Operations: Lock-Free Programming
In the world of modern C++ programming, concurrency and parallelism have become increasingly important. As developers, we often need to...
Deadlock Detection and Recovery: Graph-based Algorithms for Operating Systems
Introduction to Deadlock Detection and Recovery Deadlock is one of the most critical challenges in operating systems where multiple processes...