Real-time embedded operating systems (RTOS) form the backbone of countless devices we interact with daily, from automotive systems to medical devices and industrial automation. This comprehensive guide explores two industry-leading RTOS platforms: FreeRTOS and VxWorks, examining their architectures, capabilities, and real-world applications.
Understanding Real-Time Operating Systems
A Real-Time Operating System (RTOS) is designed to handle events and process data within strict time constraints. Unlike general-purpose operating systems that optimize for throughput, an RTOS prioritizes deterministic behavior and predictable response times.
Key Characteristics of RTOS
- Deterministic scheduling: Tasks execute within guaranteed time bounds
- Low latency: Minimal delay between event occurrence and system response
- Preemptive multitasking: Higher priority tasks can interrupt lower priority ones
- Resource management: Efficient handling of memory, CPU, and peripherals
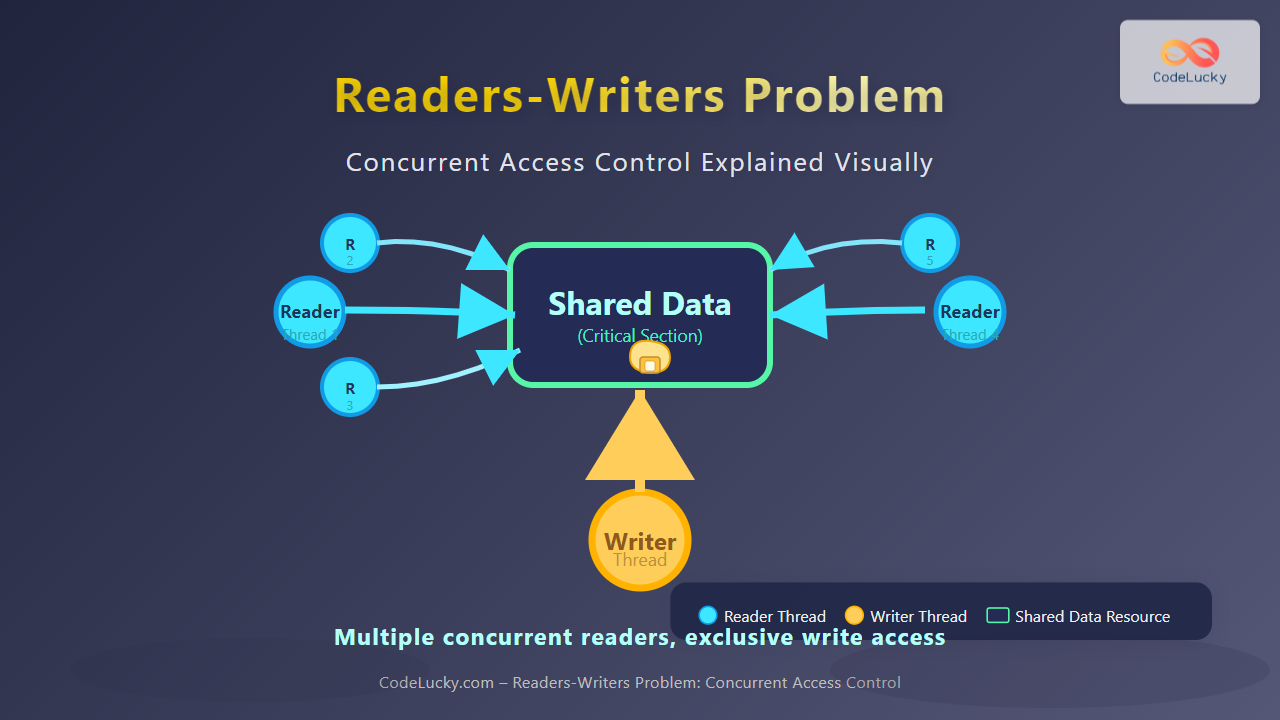
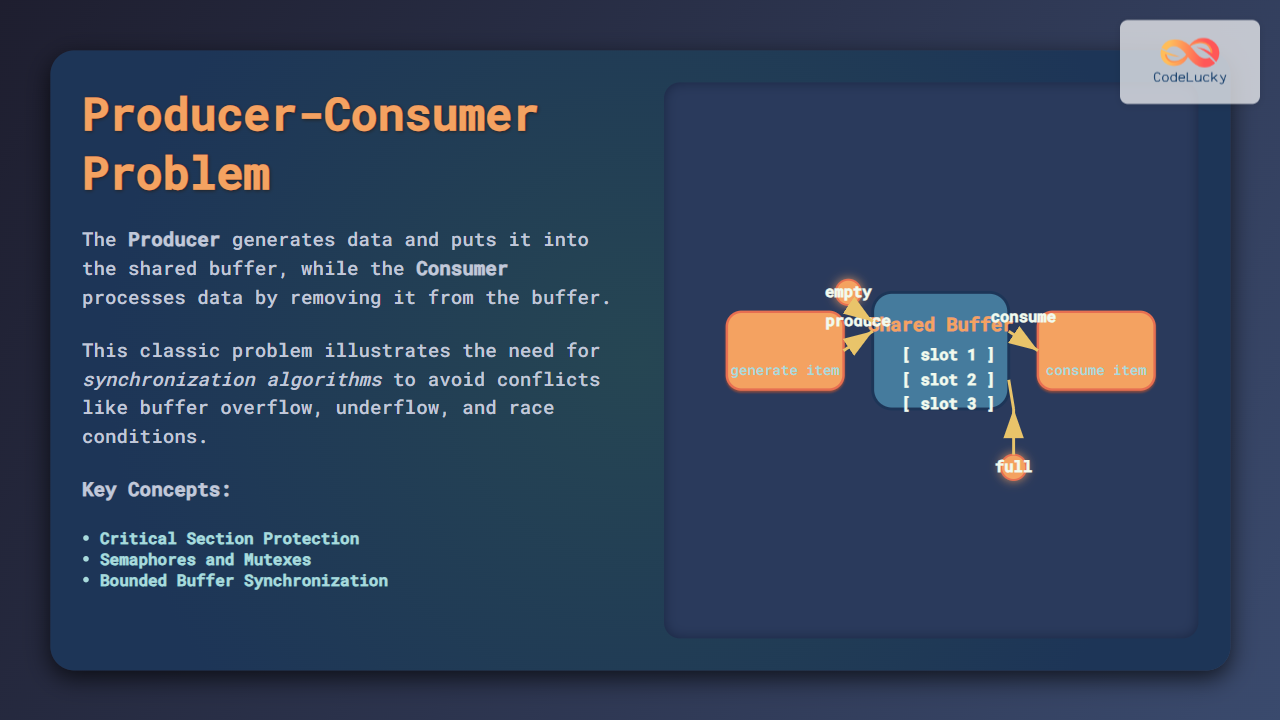
- Inter-task communication: Mechanisms for safe data sharing between tasks

FreeRTOS: The Open-Source Powerhouse
FreeRTOS is a market-leading real-time operating system kernel for microcontrollers and small microprocessors. Developed by Real Time Engineers Ltd., it’s distributed under the MIT license, making it free for both commercial and non-commercial use.
FreeRTOS Architecture
FreeRTOS follows a microkernel architecture with a small, efficient core that provides essential services:
- Task Management: Create, delete, and schedule tasks
- Memory Management: Dynamic and static memory allocation
- Inter-task Communication: Queues, semaphores, and mutexes
- Time Management: Software timers and delay functions

FreeRTOS Task Management Example
Here’s a practical example demonstrating task creation and management in FreeRTOS:
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
// Task handles
TaskHandle_t sensorTaskHandle;
TaskHandle_t actuatorTaskHandle;
// Queue for inter-task communication
QueueHandle_t sensorQueue;
// Sensor reading task
void sensorTask(void *pvParameters) {
int sensorValue;
while(1) {
// Read sensor (simulated)
sensorValue = readTemperatureSensor();
// Send data to queue
xQueueSend(sensorQueue, &sensorValue, portMAX_DELAY);
// Wait 100ms before next reading
vTaskDelay(pdMS_TO_TICKS(100));
}
}
// Actuator control task
void actuatorTask(void *pvParameters) {
int receivedValue;
while(1) {
// Wait for sensor data
if(xQueueReceive(sensorQueue, &receivedValue, portMAX_DELAY) == pdTRUE) {
// Control actuator based on sensor reading
if(receivedValue > 75) {
turnOnCoolingFan();
} else {
turnOffCoolingFan();
}
}
}
}
int main(void) {
// Create queue for 10 integers
sensorQueue = xQueueCreate(10, sizeof(int));
// Create tasks
xTaskCreate(sensorTask, "Sensor", 128, NULL, 2, &sensorTaskHandle);
xTaskCreate(actuatorTask, "Actuator", 128, NULL, 1, &actuatorTaskHandle);
// Start scheduler
vTaskStartScheduler();
return 0;
}FreeRTOS Key Features
| Feature | Description | Benefit |
|---|---|---|
| Small Footprint | Core kernel uses only 6-12KB of ROM | Suitable for resource-constrained devices |
| Preemptive Scheduler | Priority-based task scheduling | Guaranteed response times for critical tasks |
| Multiple Priorities | Up to 32 priority levels | Fine-grained task prioritization |
| Queue Management | FIFO queues for data exchange | Safe inter-task communication |
| Memory Protection | Stack overflow detection | Enhanced system reliability |
VxWorks: The Industrial-Grade Solution
VxWorks, developed by Wind River Systems (now part of Intel), is a commercial real-time operating system widely used in mission-critical applications. It powers everything from Mars rovers to nuclear power plants and automotive systems.
VxWorks Architecture
VxWorks employs a monolithic kernel architecture with comprehensive system services integrated into the kernel space:

VxWorks Task Example
Here’s an example showing VxWorks task creation and synchronization:
#include "vxWorks.h"
#include "taskLib.h"
#include "semLib.h"
#include "msgQLib.h"
// Global variables
int taskId1, taskId2;
SEM_ID syncSemaphore;
MSG_Q_ID dataQueue;
// High priority task
void criticalTask(void) {
char message[50];
while(1) {
// Wait for message
if(msgQReceive(dataQueue, message, 50, WAIT_FOREVER) != ERROR) {
printf("Critical task processing: %s\n", message);
// Process critical data
processCriticalData(message);
// Signal completion
semGive(syncSemaphore);
}
}
}
// Lower priority task
void dataCollectionTask(void) {
char sensorData[50];
int counter = 0;
while(1) {
// Simulate data collection
sprintf(sensorData, "Sensor reading #%d", counter++);
// Send to critical task
msgQSend(dataQueue, sensorData, strlen(sensorData) + 1,
NO_WAIT, MSG_PRI_NORMAL);
// Wait for processing completion
semTake(syncSemaphore, WAIT_FOREVER);
// Delay before next reading
taskDelay(sysClkRateGet() / 10); // 100ms delay
}
}
void initializeSystem(void) {
// Create synchronization semaphore
syncSemaphore = semBCreate(SEM_Q_PRIORITY, SEM_EMPTY);
// Create message queue
dataQueue = msgQCreate(10, 50, MSG_Q_PRIORITY);
// Create tasks
taskId1 = taskSpawn("tCritical", 100, 0, 8192,
(FUNCPTR)criticalTask, 0,0,0,0,0,0,0,0,0,0);
taskId2 = taskSpawn("tDataCol", 150, 0, 8192,
(FUNCPTR)dataCollectionTask, 0,0,0,0,0,0,0,0,0,0);
}VxWorks Advanced Features
- Memory Protection Units (MPU): Hardware-enforced memory isolation
- POSIX Compliance: Standard API compatibility for portability
- SMP Support: Symmetric multiprocessing for multi-core systems
- Real-time Networking: Deterministic network communication
- Safety Certification: DO-178C, IEC 61508, ISO 26262 compliance
Detailed Comparison: FreeRTOS vs VxWorks

| Aspect | FreeRTOS | VxWorks |
|---|---|---|
| License | MIT License (Free) | Commercial License Required |
| Memory Footprint | 6-12 KB (minimal kernel) | 200KB+ (full-featured kernel) |
| Real-time Performance | Microsecond response times | Sub-microsecond response times |
| Safety Certification | SafeRTOS available separately | Built-in certification support |
| Development Tools | Basic debugging tools | Comprehensive IDE and profiling |
| Community Support | Large open-source community | Professional support included |
| Learning Curve | Moderate | Steep |
Performance Analysis and Benchmarks
Context Switch Performance
Context switching is crucial for RTOS performance. Here’s a comparison of typical context switch times:
// FreeRTOS context switch measurement
void measureContextSwitch(void) {
uint32_t startTime, endTime;
TaskHandle_t testTask;
startTime = getCurrentTime();
// Force context switch
xTaskCreate(dummyTask, "Test", 128, NULL,
configMAX_PRIORITIES - 1, &testTask);
// This will cause immediate context switch
taskYIELD();
endTime = getCurrentTime();
printf("Context switch time: %d microseconds\n",
endTime - startTime);
vTaskDelete(testTask);
}
// Results (typical ARM Cortex-M4 @ 168MHz):
// FreeRTOS: 1-3 microseconds
// VxWorks: 0.5-1.5 microsecondsInterrupt Latency Comparison
- FreeRTOS: 2-10 microseconds (depending on configuration)
- VxWorks: 0.5-3 microseconds (optimized interrupt handling)
Real-World Applications and Use Cases
FreeRTOS Applications
- IoT Devices: Smart home sensors, wearable devices
- Consumer Electronics: Smart appliances, fitness trackers
- Industrial Sensors: Environmental monitoring, quality control
- Educational Projects: University research, prototyping
VxWorks Applications
- Aerospace: Mars rovers, satellite systems, avionics
- Automotive: Engine control units, autonomous driving systems
- Medical Devices: Life support systems, surgical robots
- Nuclear Power: Reactor control systems, safety monitoring
Implementation Best Practices
FreeRTOS Optimization Tips
// Configure for optimal performance
#define configUSE_PREEMPTION 1
#define configUSE_TIME_SLICING 0 // Disable for deterministic behavior
#define configMAX_PRIORITIES 8 // Limit for faster scheduling
#define configMINIMAL_STACK_SIZE 128
#define configUSE_16_BIT_TICKS 0 // Use 32-bit for longer delays
// Memory allocation optimization
#define configSUPPORT_DYNAMIC_ALLOCATION 1
#define configSUPPORT_STATIC_ALLOCATION 1
#define configTOTAL_HEAP_SIZE (20 * 1024)
// Enable stack overflow detection
#define configCHECK_FOR_STACK_OVERFLOW 2VxWorks Performance Tuning
// System configuration for optimal performance
STATUS configureSystem(void) {
// Set high resolution timer
sysClkRateSet(1000); // 1ms tick
// Configure memory pools
memPartAddToPool(memSysPartId, pMemPool, POOL_SIZE);
// Set interrupt priorities
intConnect(INUM_TO_IVEC(INT_VEC_TIMER), timerISR, 0);
intEnable(INT_VEC_TIMER);
// Configure network stack for real-time
ipAttach(0, "rtnet");
return OK;
}Migration and Selection Guidelines
When to Choose FreeRTOS
- Budget constraints: Limited development budget
- Simple applications: Basic real-time requirements
- Learning and prototyping: Educational or proof-of-concept projects
- Small memory footprint: Resource-constrained devices
When to Choose VxWorks
- Mission-critical systems: Life-safety or high-reliability requirements
- Complex applications: Multi-processor, networked systems
- Certification requirements: Safety-critical industry standards
- Professional support: Need for vendor support and training

Future Trends and Evolution
Both RTOS platforms continue evolving to meet emerging demands:
FreeRTOS Developments
- AWS IoT Integration: Enhanced cloud connectivity
- Machine Learning Support: TensorFlow Lite integration
- Security Enhancements: Hardware security module support
- Multi-core Support: SMP capabilities for modern processors
VxWorks Evolution
- Edge Computing: AI/ML processing at the edge
- Cybersecurity: Advanced threat protection
- Container Support: Docker container runtime
- 5G Integration: Ultra-low latency networking
Conclusion
Both FreeRTOS and VxWorks serve crucial roles in the real-time embedded systems landscape. FreeRTOS excels in cost-effectiveness, simplicity, and broad hardware support, making it ideal for IoT devices, consumer electronics, and educational projects. VxWorks dominates in mission-critical applications requiring the highest levels of reliability, performance, and safety certification.
The choice between these platforms ultimately depends on your specific requirements: project complexity, safety requirements, budget constraints, and performance demands. Understanding both systems’ strengths and limitations enables informed decisions that align with your embedded system goals.
As the embedded systems industry continues evolving toward edge computing, IoT integration, and AI-enabled devices, both FreeRTOS and VxWorks are adapting to meet these challenges while maintaining their core real-time capabilities that make them indispensable tools for embedded developers.