Embedded operating systems form the backbone of countless devices we interact with daily, from smart home appliances to automotive control units. Unlike traditional desktop operating systems, embedded OS are specifically designed to operate within strict resource constraints while maintaining deterministic behavior and real-time responsiveness.
What is an Embedded Operating System?
An embedded operating system is a specialized computer operating system designed to operate on embedded computer systems. These systems typically have limited computational resources, including restricted memory, processing power, and storage capacity. The primary goal is to provide essential operating system services while consuming minimal system resources.
Key Characteristics of Embedded Operating Systems
- Real-time Performance: Deterministic response times for critical operations
- Resource Efficiency: Minimal memory and CPU usage
- Reliability: High availability and fault tolerance
- Customization: Tailored to specific application requirements
- Power Management: Optimized energy consumption

Types of Embedded Operating Systems
1. Real-Time Operating Systems (RTOS)
RTOS are designed to provide predictable response times and handle time-critical operations. They are categorized into two main types:
Hard Real-Time Systems
These systems have strict timing requirements where missing a deadline can result in system failure or catastrophic consequences.
// Example: Hard real-time task in FreeRTOS
void criticalTask(void *parameters) {
TickType_t lastWakeTime = xTaskGetTickCount();
const TickType_t period = pdMS_TO_TICKS(10); // 10ms period
for(;;) {
// Critical operation must complete within 10ms
performCriticalOperation();
// Wait for next period
vTaskDelayUntil(&lastWakeTime, period);
}
}
Soft Real-Time Systems
These systems have timing requirements, but occasional deadline misses are acceptable without catastrophic failure.
2. Multi-tasking Operating Systems
Support concurrent execution of multiple tasks through various scheduling algorithms:

3. Single-tasking Operating Systems
Execute one task at a time, suitable for simple applications with minimal resource requirements.
Memory Management in Resource-Constrained Environments
Memory Types and Organization
Embedded systems typically work with various memory types, each serving specific purposes:
| Memory Type | Characteristics | Typical Usage | Size Range |
|---|---|---|---|
| Flash Memory | Non-volatile, program storage | OS kernel, application code | 32KB – 2MB |
| SRAM | Volatile, fast access | Runtime variables, stack | 4KB – 512KB |
| EEPROM | Non-volatile, data storage | Configuration, calibration | 512B – 64KB |
Memory Management Strategies
Static Memory Allocation
All memory is allocated at compile time, providing predictable memory usage:
// Static allocation example
#define MAX_BUFFER_SIZE 256
#define MAX_TASKS 8
static uint8_t dataBuffer[MAX_BUFFER_SIZE];
static TaskControlBlock tasks[MAX_TASKS];
void initializeSystem() {
// All memory already allocated
memset(dataBuffer, 0, MAX_BUFFER_SIZE);
initializeTasks(tasks, MAX_TASKS);
}
Dynamic Memory Management
Memory allocated and deallocated during runtime, requiring careful management to prevent fragmentation:
// Dynamic allocation with heap management
void* allocateBuffer(size_t size) {
void* ptr = pvPortMalloc(size);
if (ptr == NULL) {
// Handle allocation failure
handleMemoryError();
return NULL;
}
return ptr;
}
void deallocateBuffer(void* ptr) {
if (ptr != NULL) {
vPortFree(ptr);
}
}
Memory Pool Management
Pre-allocated memory pools prevent fragmentation and provide deterministic allocation times:
// Memory pool implementation
typedef struct {
uint8_t pool[POOL_SIZE];
uint32_t blockSize;
uint32_t numBlocks;
uint32_t freeBlocks;
uint8_t* freeList;
} MemoryPool;
void* poolAlloc(MemoryPool* pool) {
if (pool->freeBlocks == 0) {
return NULL; // Pool exhausted
}
void* block = pool->freeList;
pool->freeList = *(uint8_t**)pool->freeList;
pool->freeBlocks--;
return block;
}
Task Scheduling and Priority Management
Scheduling Algorithms

Priority Inversion and Solutions
Priority inversion occurs when a high-priority task is blocked by a lower-priority task. Common solutions include:
Priority Inheritance Protocol
// Priority inheritance example
void acquireMutex(Mutex* mutex, Task* currentTask) {
if (mutex->owner != NULL) {
// Check if priority inheritance is needed
if (currentTask->priority > mutex->owner->priority) {
// Temporarily boost owner's priority
inheritPriority(mutex->owner, currentTask->priority);
}
}
// Wait for mutex availability
blockTask(currentTask, mutex);
}
Priority Ceiling Protocol
// Priority ceiling implementation
typedef struct {
uint8_t ceilingPriority;
Task* owner;
bool isLocked;
} CeilingMutex;
bool acquireCeilingMutex(CeilingMutex* mutex, Task* task) {
if (task->priority <= mutex->ceilingPriority) {
return false; // Access denied
}
// Temporarily raise task priority to ceiling
task->effectivePriority = mutex->ceilingPriority;
mutex->owner = task;
mutex->isLocked = true;
return true;
}
Device Driver Architecture
Layered Driver Model
Embedded systems often use a layered approach for device drivers to promote modularity and reusability:

Interrupt-Driven I/O
Efficient I/O handling through interrupts minimizes CPU usage and improves system responsiveness:
// UART interrupt handler example
volatile CircularBuffer rxBuffer;
volatile CircularBuffer txBuffer;
void UART_IRQHandler(void) {
uint32_t status = UART->STATUS;
// Handle received data
if (status & UART_RX_READY) {
uint8_t data = UART->DATA;
if (!bufferFull(&rxBuffer)) {
bufferPut(&rxBuffer, data);
}
}
// Handle transmit ready
if (status & UART_TX_EMPTY) {
if (!bufferEmpty(&txBuffer)) {
UART->DATA = bufferGet(&txBuffer);
} else {
// Disable TX interrupt when buffer empty
UART->CTRL &= ~UART_TX_INT_EN;
}
}
}
// Non-blocking UART send function
bool uartSend(uint8_t* data, size_t length) {
for (size_t i = 0; i < length; i++) {
if (bufferFull(&txBuffer)) {
return false; // Buffer full
}
bufferPut(&txBuffer, data[i]);
}
// Enable TX interrupt
UART->CTRL |= UART_TX_INT_EN;
return true;
}
Power Management Strategies
Sleep Modes and Wake-up Sources
Embedded systems implement various power-saving modes to extend battery life:
// Power management state machine
typedef enum {
POWER_ACTIVE,
POWER_IDLE,
POWER_STANDBY,
POWER_DEEP_SLEEP
} PowerState;
void enterLowPowerMode(PowerState state) {
// Save critical system state
saveSystemContext();
switch (state) {
case POWER_IDLE:
// CPU stopped, peripherals active
__WFI(); // Wait for interrupt
break;
case POWER_STANDBY:
// Most peripherals disabled
disableNonCriticalPeripherals();
configureLowPowerClock();
__WFI();
break;
case POWER_DEEP_SLEEP:
// Minimal power consumption
configureWakeupSources();
disableAllPeripherals();
enterDeepSleepMode();
break;
}
// Restore system state on wake-up
restoreSystemContext();
}
Dynamic Voltage and Frequency Scaling (DVFS)
// DVFS implementation
typedef struct {
uint32_t frequency;
uint32_t voltage;
uint32_t powerConsumption;
} PowerProfile;
PowerProfile profiles[] = {
{168000000, 1200, 150}, // High performance
{84000000, 1100, 75}, // Medium performance
{42000000, 1000, 35}, // Low power
{8000000, 900, 10} // Ultra low power
};
void adjustPerformance(uint8_t profileIndex) {
PowerProfile* profile = &profiles[profileIndex];
// Scale voltage first when increasing frequency
if (profile->frequency > getCurrentFrequency()) {
setVoltage(profile->voltage);
delayMicroseconds(100); // Settling time
}
// Change CPU frequency
setCPUFrequency(profile->frequency);
// Scale voltage down when decreasing frequency
if (profile->frequency < getCurrentFrequency()) {
setVoltage(profile->voltage);
}
}
Popular Embedded Operating Systems
FreeRTOS
A real-time operating system kernel for embedded devices, supporting over 40 architectures:
// FreeRTOS task creation example
void createApplicationTasks(void) {
// Create high-priority sensor task
xTaskCreate(
sensorTask, // Task function
"SensorTask", // Task name
configMINIMAL_STACK_SIZE, // Stack size
NULL, // Parameters
3, // Priority
&sensorTaskHandle // Task handle
);
// Create medium-priority processing task
xTaskCreate(
processingTask,
"ProcessingTask",
configMINIMAL_STACK_SIZE * 2,
NULL,
2,
&processingTaskHandle
);
// Create low-priority communication task
xTaskCreate(
commTask,
"CommTask",
configMINIMAL_STACK_SIZE,
NULL,
1,
&commTaskHandle
);
}
Zephyr RTOS
A scalable real-time operating system supporting multiple hardware platforms:
// Zephyr thread definition
#define THREAD_STACK_SIZE 1024
#define THREAD_PRIORITY 7
K_THREAD_STACK_DEFINE(sensor_stack, THREAD_STACK_SIZE);
struct k_thread sensor_thread;
void sensor_thread_entry(void *p1, void *p2, void *p3) {
while (1) {
// Read sensor data
int32_t temperature = readTemperature();
int32_t humidity = readHumidity();
// Send data to processing thread
struct sensor_data data = {temperature, humidity};
k_msgq_put(&sensor_msgq, &data, K_NO_WAIT);
// Sleep for 1 second
k_sleep(K_SECONDS(1));
}
}
void main(void) {
// Create sensor thread
k_thread_create(&sensor_thread, sensor_stack, THREAD_STACK_SIZE,
sensor_thread_entry, NULL, NULL, NULL,
THREAD_PRIORITY, 0, K_NO_WAIT);
}
System Integration and Communication
Inter-Process Communication (IPC)

Message Passing Implementation
// Message queue implementation
typedef struct {
uint8_t* buffer;
size_t itemSize;
size_t maxItems;
size_t head;
size_t tail;
size_t count;
SemaphoreHandle_t mutex;
SemaphoreHandle_t notEmpty;
SemaphoreHandle_t notFull;
} MessageQueue;
bool messageQueueSend(MessageQueue* queue, void* item, uint32_t timeout) {
// Wait for space in queue
if (xSemaphoreTake(queue->notFull, timeout) != pdTRUE) {
return false; // Timeout
}
// Critical section for queue modification
xSemaphoreTake(queue->mutex, portMAX_DELAY);
// Copy item to queue
memcpy(queue->buffer + (queue->tail * queue->itemSize),
item, queue->itemSize);
queue->tail = (queue->tail + 1) % queue->maxItems;
queue->count++;
xSemaphoreGive(queue->mutex);
// Signal that queue is not empty
xSemaphoreGive(queue->notEmpty);
return true;
}
Performance Optimization Techniques
Code Optimization
Optimizing code for embedded systems involves several strategies:
Memory Access Optimization
// Optimize memory access patterns
void processData(uint32_t* data, size_t length) {
// Bad: Non-sequential access
for (size_t i = 0; i < length; i += 2) {
data[i] = processValue(data[i]);
}
for (size_t i = 1; i < length; i += 2) {
data[i] = processValue(data[i]);
}
// Good: Sequential access
for (size_t i = 0; i < length; i++) {
data[i] = processValue(data[i]);
}
}
Loop Optimization
// Loop unrolling for performance
void vectorAdd(int32_t* a, int32_t* b, int32_t* result, size_t length) {
size_t i = 0;
// Process 4 elements at a time
for (; i + 4 <= length; i += 4) {
result[i] = a[i] + b[i];
result[i + 1] = a[i + 1] + b[i + 1];
result[i + 2] = a[i + 2] + b[i + 2];
result[i + 3] = a[i + 3] + b[i + 3];
}
// Handle remaining elements
for (; i < length; i++) {
result[i] = a[i] + b[i];
}
}
Profiling and Monitoring
// Runtime performance monitoring
typedef struct {
uint32_t totalTime;
uint32_t maxTime;
uint32_t minTime;
uint32_t callCount;
} PerformanceCounter;
PerformanceCounter taskCounters[MAX_TASKS];
void profileTaskExecution(uint8_t taskId, uint32_t executionTime) {
PerformanceCounter* counter = &taskCounters[taskId];
counter->totalTime += executionTime;
counter->callCount++;
if (executionTime > counter->maxTime) {
counter->maxTime = executionTime;
}
if (counter->minTime == 0 || executionTime < counter->minTime) {
counter->minTime = executionTime;
}
}
// Calculate average execution time
uint32_t getAverageExecutionTime(uint8_t taskId) {
PerformanceCounter* counter = &taskCounters[taskId];
return counter->callCount > 0 ?
counter->totalTime / counter->callCount : 0;
}
Security Considerations
Secure Boot Process
Implementing secure boot ensures system integrity from startup:
// Secure boot verification
typedef struct {
uint32_t magic;
uint32_t version;
uint32_t imageSize;
uint8_t signature[32];
uint8_t hash[32];
} BootHeader;
bool verifyBootImage(void* imageAddress) {
BootHeader* header = (BootHeader*)imageAddress;
// Verify magic number
if (header->magic != BOOT_MAGIC) {
return false;
}
// Calculate image hash
uint8_t calculatedHash[32];
sha256((uint8_t*)imageAddress + sizeof(BootHeader),
header->imageSize, calculatedHash);
// Compare with stored hash
if (memcmp(calculatedHash, header->hash, 32) != 0) {
return false;
}
// Verify digital signature (simplified)
return verifySignature(header->hash, header->signature);
}
Memory Protection
// Memory protection unit configuration
void configureMPU(void) {
// Protect kernel memory region
MPU->RNR = 0; // Region 0
MPU->RBAR = KERNEL_BASE_ADDRESS;
MPU->RASR = MPU_REGION_SIZE_64KB |
MPU_REGION_PRIV_RW |
MPU_REGION_ENABLE;
// User application region
MPU->RNR = 1; // Region 1
MPU->RBAR = USER_BASE_ADDRESS;
MPU->RASR = MPU_REGION_SIZE_128KB |
MPU_REGION_FULL_ACCESS |
MPU_REGION_ENABLE;
// Enable MPU
MPU->CTRL = MPU_CTRL_ENABLE | MPU_CTRL_PRIVDEFENA;
}
Testing and Debugging
Unit Testing in Embedded Systems
// Embedded unit test framework
typedef struct {
const char* name;
bool (*testFunction)(void);
bool passed;
} TestCase;
bool testMessageQueue(void) {
MessageQueue queue;
uint32_t testData[] = {1, 2, 3, 4, 5};
uint32_t received;
// Initialize queue
initMessageQueue(&queue, sizeof(uint32_t), 10);
// Test send and receive
for (int i = 0; i < 5; i++) {
if (!messageQueueSend(&queue, &testData[i], 0)) {
return false;
}
}
for (int i = 0; i < 5; i++) {
if (!messageQueueReceive(&queue, &received, 0)) {
return false;
}
if (received != testData[i]) {
return false;
}
}
return true;
}
TestCase tests[] = {
{"Message Queue Test", testMessageQueue, false},
// Add more tests...
};
void runTests(void) {
for (size_t i = 0; i < sizeof(tests)/sizeof(TestCase); i++) {
tests[i].passed = tests[i].testFunction();
printf("%s: %s\n", tests[i].name,
tests[i].passed ? "PASS" : "FAIL");
}
}
Future Trends and Emerging Technologies
Edge Computing Integration
Modern embedded systems are increasingly integrated with edge computing capabilities, enabling local data processing and machine learning inference:
// Edge AI inference example
typedef struct {
float input[INPUT_SIZE];
float weights[WEIGHT_SIZE];
float output[OUTPUT_SIZE];
} NeuralNetwork;
void runInference(NeuralNetwork* nn, float* sensorData) {
// Preprocess sensor data
normalizeInput(sensorData, nn->input, INPUT_SIZE);
// Simple neural network forward pass
matrixMultiply(nn->input, nn->weights, nn->output);
applySigmoid(nn->output, OUTPUT_SIZE);
// Post-process results
int classification = getMaxIndex(nn->output, OUTPUT_SIZE);
handleClassification(classification);
}
IoT Connectivity
Enhanced connectivity options enable seamless integration with IoT ecosystems:
// IoT protocol abstraction
typedef struct {
bool (*connect)(const char* endpoint);
bool (*publish)(const char* topic, void* data, size_t length);
bool (*subscribe)(const char* topic);
void (*disconnect)(void);
} IoTProtocol;
// MQTT implementation
IoTProtocol mqttProtocol = {
.connect = mqttConnect,
.publish = mqttPublish,
.subscribe = mqttSubscribe,
.disconnect = mqttDisconnect
};
// Generic IoT data transmission
bool sendSensorData(IoTProtocol* protocol, SensorData* data) {
if (!protocol->connect(IOT_ENDPOINT)) {
return false;
}
// Serialize sensor data
uint8_t buffer[256];
size_t length = serializeSensorData(data, buffer, sizeof(buffer));
// Publish to IoT platform
bool result = protocol->publish("sensors/data", buffer, length);
return result;
}
Conclusion
Embedded operating systems continue to evolve, addressing the growing complexity of modern embedded applications while maintaining the fundamental requirements of resource efficiency and real-time performance. Understanding the principles of memory management, task scheduling, and system optimization is crucial for developing robust embedded solutions.
As embedded systems become increasingly connected and intelligent, developers must balance traditional constraints with new capabilities like edge computing and IoT integration. The future of embedded operating systems lies in providing greater abstraction and development productivity while preserving the deterministic behavior and efficiency that defines embedded computing.
Success in embedded system development requires careful consideration of hardware constraints, application requirements, and system lifecycle management. By applying the concepts and techniques outlined in this guide, developers can create efficient, reliable, and maintainable embedded systems that meet the demands of modern applications.
Related Posts
C in Embedded Systems: Basics of Embedded Programming
Embedded systems are ubiquitous in our modern world, powering everything from smart home devices to automotive control systems. At the...

Operating System Types: Real-time, Distributed, Mobile and Desktop Systems Explained
Operating systems serve as the crucial bridge between computer hardware and software applications, but not all operating systems are created...

Windows Operating System: Complete Guide to Architecture and Core Components
The Windows Operating System stands as one of the most widely used operating systems globally, powering billions of devices from...

Kernel in Operating System: Core Functions and Memory Management
The kernel stands as the fundamental cornerstone of any operating system, serving as the critical bridge between hardware components and...
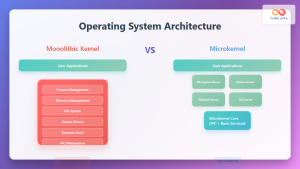
Operating System Architecture: Monolithic vs Microkernel Design Patterns
Introduction to Operating System Architecture Operating system architecture defines how the core components of an OS are organized and interact...
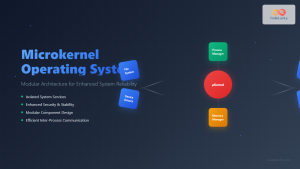
Microkernel Operating System: Modular Architecture for Enhanced System Reliability
What is a Microkernel Operating System? A microkernel operating system represents a minimalist approach to kernel design where only the...

Operating System Functions: Core Components and System Responsibilities
An operating system (OS) serves as the fundamental software layer that manages computer hardware resources and provides essential services to...

Process in Operating System: Complete Guide to Definition, States and Lifecycle
What is a Process in Operating System? A process is a program in execution that consists of the program code...
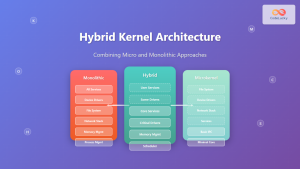
Hybrid Kernel: Complete Guide to Combining Micro and Monolithic Kernel Architectures
A hybrid kernel represents an evolutionary approach in operating system design that strategically combines elements from both microkernel and monolithic...
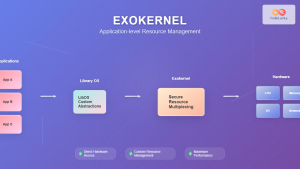
Exokernel: Application-level Resource Management Architecture in Operating Systems
Introduction to Exokernel Architecture The exokernel represents a revolutionary approach to operating system design that fundamentally challenges traditional kernel architectures....
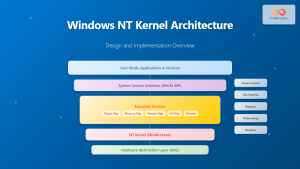
Windows NT Kernel: Complete Guide to Design, Architecture and Implementation
Introduction to Windows NT Kernel The Windows NT Kernel forms the foundation of all modern Windows operating systems, from Windows...
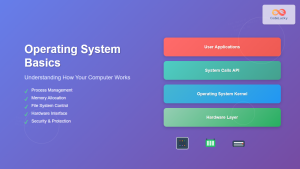
Operating System Basics: Complete Guide to What is an OS and How it Works
An operating system (OS) is the fundamental software that manages computer hardware and software resources, acting as an intermediary between...
- What is an Embedded Operating System?
- Types of Embedded Operating Systems
- Memory Management in Resource-Constrained Environments
- Task Scheduling and Priority Management
- Device Driver Architecture
- Power Management Strategies
- Popular Embedded Operating Systems
- System Integration and Communication
- Performance Optimization Techniques
- Security Considerations
- Testing and Debugging
- Future Trends and Emerging Technologies
- Conclusion