What is the Critical Section Problem?
The critical section problem is a fundamental challenge in operating systems where multiple processes need to access shared resources simultaneously. When processes execute concurrently, they may need to access common variables, files, or hardware devices. Without proper coordination, this can lead to race conditions and inconsistent data states.
A critical section is a segment of code where a process accesses shared resources that must not be accessed by more than one process at a time. The critical section problem involves designing protocols to ensure that when one process is executing in its critical section, no other process can execute in its critical section for the same shared resource.

Structure of Critical Section
Every process that needs to access shared resources follows a specific structure:
do {
entry_section(); // Request permission to enter
critical_section(); // Access shared resources
exit_section(); // Release access permission
remainder_section(); // Non-critical code
} while (true);
Components Explained
- Entry Section: Code that requests permission to enter the critical section
- Critical Section: Code segment accessing shared resources
- Exit Section: Code that releases the permission
- Remainder Section: Rest of the process code
Requirements for Critical Section Solutions
Any solution to the critical section problem must satisfy three essential requirements:
1. Mutual Exclusion
If a process is executing in its critical section, then no other process can execute in its critical section simultaneously.
2. Progress
If no process is executing in the critical section and some processes wish to enter, only those processes not in their remainder section can participate in deciding which will enter next.
3. Bounded Waiting
There must be a bound on the number of times other processes are allowed to enter their critical sections after a process has made a request and before that request is granted.
Classical Solutions to Critical Section Problem
1. Peterson’s Algorithm
Peterson’s algorithm is a software-based solution for two processes. It uses two shared variables:
flag[2]: Boolean array indicating if a process wants to enter critical sectionturn: Integer variable indicating whose turn it is to enter
// Shared variables
boolean flag[2] = {false, false};
int turn = 0;
// Process Pi (i = 0 or 1)
do {
flag[i] = true; // Show interest
turn = j; // Give turn to other process
while (flag[j] && turn == j); // Wait
// Critical Section
flag[i] = false; // Release interest
// Remainder Section
} while (true);

Peterson’s Algorithm Analysis
Advantages:
- Satisfies all three requirements
- Simple software solution
- No special hardware instructions needed
Disadvantages:
- Works only for two processes
- Busy waiting (CPU wastage)
- Not suitable for modern architectures with relaxed memory models
2. Bakery Algorithm
The Bakery Algorithm extends Peterson’s approach to n processes, similar to a bakery numbering system:
// Shared variables
boolean choosing[n] = {false};
int number[n] = {0};
// Process Pi
do {
choosing[i] = true;
number[i] = max(number[0], number[1], ..., number[n-1]) + 1;
choosing[i] = false;
for (j = 0; j < n; j++) {
while (choosing[j]);
while ((number[j] != 0) &&
((number[j], j) < (number[i], i)));
}
// Critical Section
number[i] = 0;
// Remainder Section
} while (true);
3. Hardware-Based Solutions
Test-and-Set Instruction
Many processors provide atomic test-and-set instructions:
boolean test_and_set(boolean *target) {
boolean rv = *target;
*target = true;
return rv;
}
// Shared variable
boolean lock = false;
// Process Pi
do {
while (test_and_set(&lock)); // Acquire lock
// Critical Section
lock = false; // Release lock
// Remainder Section
} while (true);
Compare-and-Swap Instruction
int compare_and_swap(int *value, int expected, int new_value) {
int temp = *value;
if (*value == expected)
*value = new_value;
return temp;
}
// Usage
int lock = 0;
do {
while (compare_and_swap(&lock, 0, 1) != 0); // Acquire
// Critical Section
lock = 0; // Release
// Remainder Section
} while (true);
High-Level Synchronization Primitives
1. Semaphores
Semaphores are integer variables accessed through two atomic operations: wait() and signal().

Binary Semaphore (Mutex)
// Semaphore operations
wait(semaphore S) {
while (S <= 0); // Busy wait
S--;
}
signal(semaphore S) {
S++;
}
// Usage
semaphore mutex = 1;
// Process Pi
do {
wait(mutex);
// Critical Section
signal(mutex);
// Remainder Section
} while (true);
Counting Semaphore Example
// Resource allocation example
semaphore resource_count = 3; // 3 identical resources
// Process requesting resource
do {
wait(resource_count); // Acquire resource
// Use resource (Critical Section)
signal(resource_count); // Release resource
// Other work
} while (true);
2. Mutex Locks
Mutex (Mutual Exclusion) locks are simpler than semaphores, designed specifically for mutual exclusion:
// Mutex structure
typedef struct {
boolean available;
queue waiting_processes;
} mutex_lock;
// Acquire lock
acquire(mutex_lock *lock) {
while (!lock->available); // Spin wait or block
lock->available = false;
}
// Release lock
release(mutex_lock *lock) {
lock->available = true;
}
// Usage
mutex_lock lock;
do {
acquire(&lock);
// Critical Section
release(&lock);
// Remainder Section
} while (true);
3. Condition Variables
Condition variables allow processes to wait for certain conditions:
// Producer-Consumer with condition variables
mutex_lock mutex;
condition full, empty;
int count = 0;
int buffer[BUFFER_SIZE];
// Producer
void producer() {
while (true) {
// Produce item
lock(mutex);
while (count == BUFFER_SIZE)
wait(full, mutex);
// Add item to buffer
count++;
signal(empty);
unlock(mutex);
}
}
// Consumer
void consumer() {
while (true) {
lock(mutex);
while (count == 0)
wait(empty, mutex);
// Remove item from buffer
count--;
signal(full);
unlock(mutex);
// Consume item
}
}
Real-World Examples and Applications
Database Transaction Management
Database systems use critical sections to ensure ACID properties:
// Bank transfer example
mutex account_mutex;
void transfer(Account from, Account to, double amount) {
acquire(&account_mutex);
// Critical Section
if (from.balance >= amount) {
from.balance -= amount;
to.balance += amount;
log_transaction(from.id, to.id, amount);
}
release(&account_mutex);
}
Web Server Request Handling
// Shared resource: log file
mutex log_mutex;
FILE *log_file;
void handle_request(Request req) {
// Process request
acquire(&log_mutex);
// Critical Section: Write to log
fprintf(log_file, "[%s] %s %s\n",
get_timestamp(), req.method, req.url);
fflush(log_file);
release(&log_mutex);
// Send response
}

Performance Considerations and Trade-offs
Busy Waiting vs Blocking
| Aspect | Busy Waiting | Blocking |
|---|---|---|
| CPU Usage | High (continuous polling) | Low (process sleeps) |
| Response Time | Fast (immediate detection) | Slower (context switch overhead) |
| Best For | Short critical sections | Long critical sections |
| Scalability | Poor with many processes | Better scalability |
Deadlock Prevention
Critical section solutions must avoid deadlocks:
// Potential deadlock scenario
mutex mutex1, mutex2;
// Process A
void processA() {
acquire(&mutex1);
acquire(&mutex2); // May deadlock with Process B
// Critical work
release(&mutex2);
release(&mutex1);
}
// Process B
void processB() {
acquire(&mutex2);
acquire(&mutex1); // May deadlock with Process A
// Critical work
release(&mutex1);
release(&mutex2);
}
// Solution: Ordered locking
void safe_processA() {
acquire(&mutex1); // Always acquire in same order
acquire(&mutex2);
// Critical work
release(&mutex2);
release(&mutex1);
}
void safe_processB() {
acquire(&mutex1); // Same order as Process A
acquire(&mutex2);
// Critical work
release(&mutex2);
release(&mutex1);
}
Modern Operating System Implementations
Linux Kernel Synchronization
Linux provides several synchronization primitives:
- Spinlocks: For short critical sections in kernel space
- Mutexes: For longer critical sections that can sleep
- Semaphores: For counting resources
- RCU (Read-Copy-Update): For high-performance read-mostly scenarios
// Linux kernel mutex example
#include
static DEFINE_MUTEX(my_mutex);
void critical_function(void) {
mutex_lock(&my_mutex);
// Critical section
// Access shared kernel data
mutex_unlock(&my_mutex);
}
Windows Synchronization Objects
Windows provides various synchronization objects:
// Windows Critical Section
#include
CRITICAL_SECTION cs;
void InitializeSynchronization() {
InitializeCriticalSection(&cs);
}
void SafeFunction() {
EnterCriticalSection(&cs);
// Critical section code
LeaveCriticalSection(&cs);
}
void Cleanup() {
DeleteCriticalSection(&cs);
}
Best Practices and Guidelines
Design Principles
- Keep Critical Sections Short: Minimize time spent in critical sections
- Avoid Nested Locks: Reduce complexity and deadlock risk
- Use Appropriate Synchronization: Choose the right tool for the job
- Consider Lock-Free Algorithms: For high-performance scenarios
Common Pitfalls to Avoid
- Priority Inversion: Low-priority process holding lock needed by high-priority process
- Lock Convoys: Many processes queuing for the same lock
- Forgot to Release: Always pair acquire with release operations
- Double Locking: Attempting to acquire the same lock twice
Testing and Debugging Synchronization
Race Condition Detection
// Example: Detecting race conditions
#include
#include
int shared_counter = 0;
pthread_mutex_t counter_mutex = PTHREAD_MUTEX_INITIALIZER;
void* increment_thread(void* arg) {
for (int i = 0; i < 100000; i++) {
// Uncomment next line to fix race condition
// pthread_mutex_lock(&counter_mutex);
shared_counter++; // Critical section
// pthread_mutex_unlock(&counter_mutex);
}
return NULL;
}
int main() {
pthread_t thread1, thread2;
pthread_create(&thread1, NULL, increment_thread, NULL);
pthread_create(&thread2, NULL, increment_thread, NULL);
pthread_join(thread1, NULL);
pthread_join(thread2, NULL);
printf("Final counter value: %d\n", shared_counter);
// Without synchronization: likely < 200000
// With synchronization: exactly 200000
return 0;
}
Debugging Tools
- Valgrind (Helgrind): Detects race conditions in C/C++ programs
- ThreadSanitizer: Google’s race condition detector
- Intel Inspector: Commercial tool for threading error detection
- Static Analysis: Tools like Coverity, PVS-Studio
Conclusion
The critical section problem is fundamental to understanding concurrent programming and operating systems. While simple in concept, implementing robust solutions requires careful consideration of mutual exclusion, progress, and bounded waiting requirements.
Modern operating systems provide sophisticated synchronization primitives that abstract away the complexity of low-level solutions like Peterson’s algorithm. However, understanding these foundational concepts is crucial for:
- Designing efficient concurrent systems
- Debugging synchronization issues
- Making informed decisions about synchronization strategies
- Understanding system behavior under load
As systems become increasingly parallel and distributed, mastering critical section solutions becomes even more important for developers working on high-performance applications, system software, and distributed systems.
Related Posts

Peterson’s Algorithm: Complete Guide to Two-Process Mutual Exclusion in Operating Systems
What is Peterson's Algorithm? Peterson's Algorithm is a classic solution for achieving mutual exclusion between two processes or threads in...
Lamport’s Bakery Algorithm: Complete Guide to N-Process Mutual Exclusion
Lamport's Bakery Algorithm stands as one of the most elegant solutions to the N-process mutual exclusion problem in concurrent programming....

Process Synchronization: Critical Sections and Race Conditions in Operating Systems
Introduction to Process Synchronization Process synchronization is a fundamental concept in operating systems that ensures multiple processes can safely access...
Deadlock Detection and Recovery: Graph-based Algorithms for Operating Systems
Introduction to Deadlock Detection and Recovery Deadlock is one of the most critical challenges in operating systems where multiple processes...
Deadlock in Operating System: Complete Guide to Necessary Conditions and Detection Methods
Deadlock is one of the most critical challenges in operating system design, where multiple processes become permanently blocked while waiting...
Thread in Operating System: Lightweight Processes and Multithreading Explained
What are Threads in Operating Systems? A thread is the smallest unit of execution within a process that can be...

Monitor in Operating System: High-level Synchronization for Process Coordination
What is a Monitor in Operating System? A monitor is a high-level synchronization construct in operating systems that provides a...
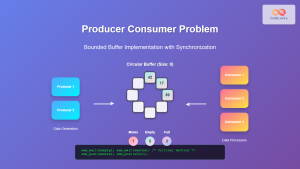
Producer Consumer Problem: Complete Guide to Bounded Buffer Implementation with Code Examples
The Producer Consumer Problem, also known as the bounded buffer problem, is one of the most fundamental synchronization problems in...
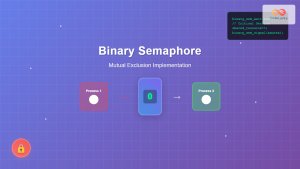
Binary Semaphore: Complete Guide to Mutual Exclusion Implementation in Operating Systems
What is a Binary Semaphore? A binary semaphore is a synchronization primitive in operating systems that can hold only two...

Multithreading in Operating Systems: Benefits, Challenges, and Implementation Guide
What is Multithreading in Operating Systems? Multithreading is a fundamental concept in modern operating systems that allows a single process...
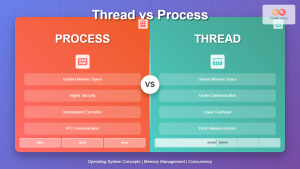
Thread vs Process: Complete Guide to Differences and When to Use Each
Understanding the fundamental differences between threads and processes is crucial for system programming, application design, and performance optimization. While both...

Multilevel Queue Scheduling: Multiple Priority Levels in Operating Systems
Introduction to Multilevel Queue Scheduling Multilevel queue scheduling is a sophisticated CPU scheduling algorithm used in operating systems to manage...